昇降リフトの設計
お疲れ様です。
チームRMのFです。
今回は現在設計を行っている昇降リフトについて紹介いたします。
設計を行い始めた経緯としては梱包作業者より、梱包された製品を納めた通函をカゴ台車に2~3段積み上げるのですが、1箱が20kg弱と女性にとっては腰や膝への負担が大きく、リフトのようなものを作れないかという相談をいただいたことがきっかけでした。
私自身、昇降機を作った経験はなく1人で作ることは不可能であるため、以前に溶接治具用の昇降リフトを製作した経験があり高度なノウハウを持ったIさんに指導をいただきながら構想と設計を進めてきました。
機構を用いるため歯車やチェーンといった部品が必要になり、耐荷重の計算を行った上で選定を行います。理論的に問題ないと判断できるラインのものを選定することは非常に面白いです。
通函には一般的フォークリフトのフォークを入れ込める隙間がないため、単純に下から持ち上げる構造ではフォークを引くときに箱ごと引っ張ってしまいます。
上部を掴んでの昇降は通函によって形状が異なるため箱に合わせて条件を変えなければならず、複雑な操作が必要になるため扱いづらいです。
コンベアで送ることも考えたが、通函を最後まで送ることが難しいことやベルト部分が激しく摩耗するため定期的な交換が必要になります。
そのため今回は通函の側面部を挟み込んで昇降させる方法しかないと判断しました。
カゴ台車に載せる通函は2種類で寸法が異なります。パターンは固定であるため、台車に2種類の通函を納めた場合に横幅に隙間はどのくらい残るのか計算すると理論値で190mm。これはあくまで理論値であり、隙間なく納めることは不可能に近いため両端に10mmずつの隙間ができたとして残りは150mm。2つの通函を納めるためには通函を挟み込むアームの幅が各50mm以内でなければなりません。
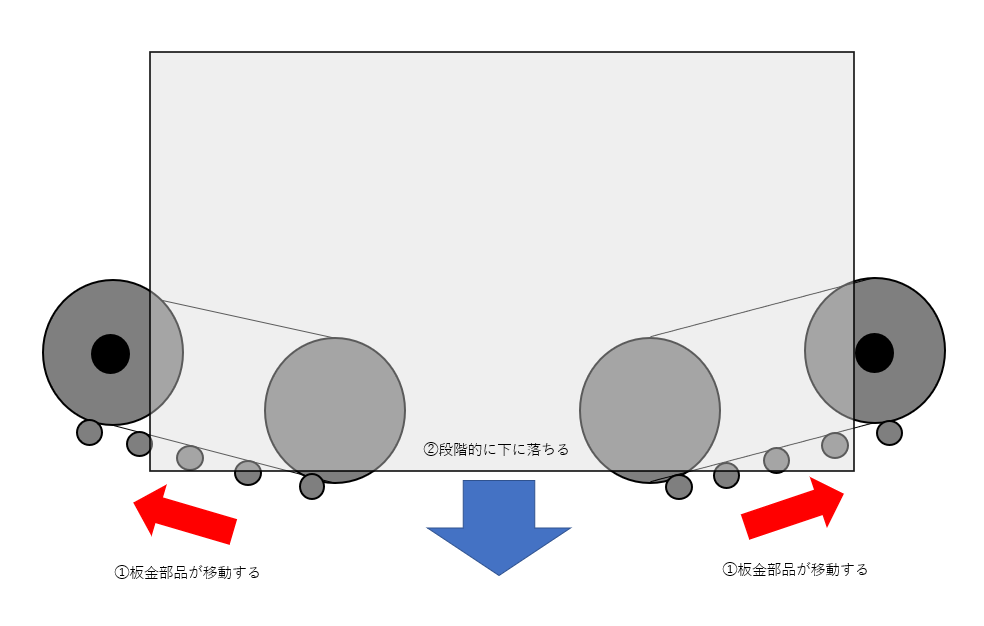
初めに考えたのが通函より手前と奥の位置にスプロケットとアイドラーを配置してアタッチメント付きのチェーンを取り付け、その間に連続した5か所程に板金部品を渡して予め下に配置された板金部品がスプロケットの回転によって外側に移動する事で箱自体が段階的に下がっていくような構造で設計を進めていました。ですが、限られたスペースでスプロケットをアームに垂直な向きで配置することは厳しいこと、箱よりも奥に隙間がある状態で載せるため最後の押し込みは人の手で行わなければならず完結できないこと、リフトへの通函の載せ方によっては渡してある板金部品が移動する際に斜めに傾く可能性があることなどの理由から断念しました。
次にアームが横方向に開閉し、アームの形状もシンプルなものになることで省スペースに対応できると思ったのですが、シンプルな形状故に長さが必要なアーム部の剛性が低くスペースの関係上断念しました。また、アームを開いた上でリフトを引き抜く必要があり今考えるとこの面でも難しかったと思います。
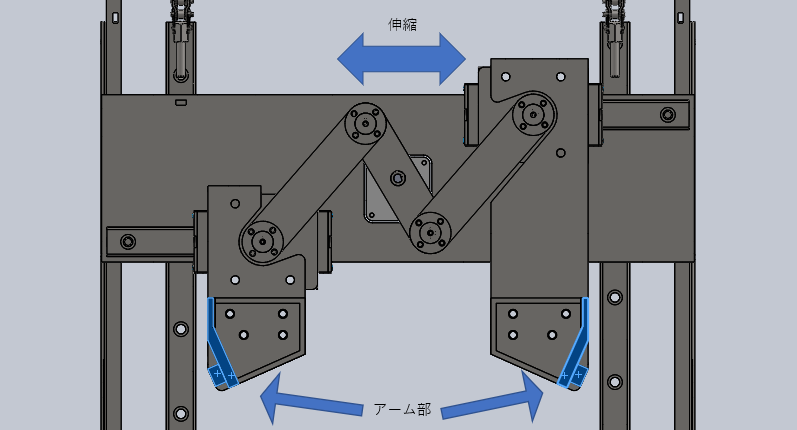
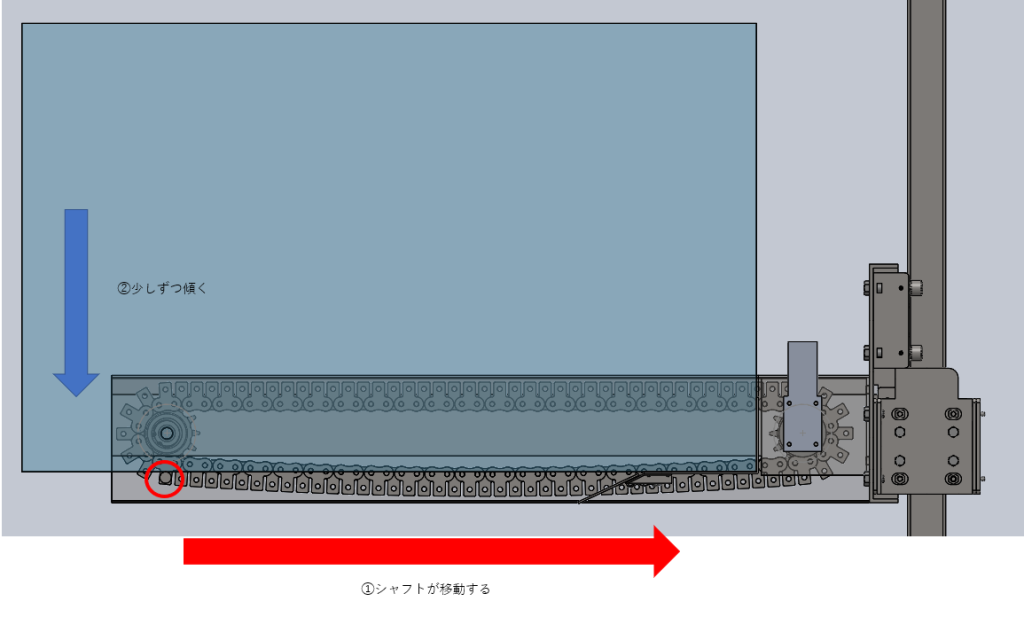
その後、初めに断念した構想を90°回転させたようなタイプで考えてみました。スプロケットとアイドラーをアームに平行な向きで手前と奥に配置し、アタッチメント付きチェーンを取り付けアーム間に1本のシャフトを通し、リフト操作側には一定寸法の台を配置しその上に通函を置きます。チェーンが回転しシャフトが手前に移動することで箱が少しずつ前傾になり、フォークとは違い接している面は1本のシャフトの一部のみと非常に小さく、抵抗を受けにくいためリフトを台車から離しながら置くことができます。この案が最終だと思っていましたが、カゴ台車が置いてある通路の幅が1.2mで全長が1m程のリフトを動かすとなると操作する人が入るスペースも必要になるため、全長が伸縮するような構造でなければ厳しいことに気付きました。
現在、伸縮機能を備えリフトの操作のみでカゴ台車への収納が完結し、シンプルな操作で扱いやすい構造のリフトの設計を進めています。
左右はもちろんですが前後の寸法も極力抑えなければなりません。
今のところ大きなデメリットは出てきていないので、順調に行けばこの案で製作に向かえると思っています。
どういった機構を用いているかなど詳細に関しては、完成品を紹介する際にインパクトが落ちることを考慮しあえて画像等の添付は控えています。
今回のタイミングでブログ担当が一区切りつくので、完成したものの紹介はまたブログ担当になった際に行おうと思っています。
関連記事
 2013年7月8日 若手社員研修
2013年7月8日 若手社員研修 2017年5月15日 社内製作の工具・備品置き場のご紹介
2017年5月15日 社内製作の工具・備品置き場のご紹介 2024年9月13日 毎日コツコツと、、、
2024年9月13日 毎日コツコツと、、、 2011年12月3日 ベトナム観てきました。
2011年12月3日 ベトナム観てきました。 2022年9月21日 台風一過
2022年9月21日 台風一過 2022年10月7日 設備のお色直し
2022年10月7日 設備のお色直し